Why Globally Re-shuffle? Revisiting Data Shuffling in Large Scale Deep Learning
ML Abstract
- Challenge
- SGD gives enormous pressure on the I/O subsystem.
- In HPC environments, we often replicate the entire dataset to node local SSDs.
- Contribution
- Investigate the viability of partitioning the dataset among workers performing only a partial distributed exchange of samples in each training epoch.
- Demonstrate that in practice validation accuracy of global shuffling exchange $\approx$ partial distributed exchange when carefully tuning.
1 INTRODUCTION
- Challenge
- As datasets growing up, it is hard to store the entire dataset on compute node local storage, or by each node reading a subset of the samples from the parallel file system (PFS)
- Insight
- Random access to the input samples has been in fact identified as one of the major contributors to poor I/O performance.
- Contribution
- Revisit data shuffling strategies when scaling deep learning applications to a large number of workers.
- Implement a dataset partitioning, shuffling, and redistribution solution for distributed training.
- Local shuffling achieves accuracy $\approx$ Global shuffling strategy !!!
- Average store #0.03% dataset
- Training time: local shuffling #5x < global shuffling
2 BACKGROUND AND MOTIVATION
3 DESIGN AND IMPLEMENTATION
- To reduce I/O requirements:
- a) we split the dataset across workers,
- b) workers train on the local partition, and
- c) worker exchange a subset of the locals samples before each epoch
- A. Data Partitioning and Shuffling Scheme
- Each worker exchanges globally a fraction Q of its local samples before each epoch. Q=1: full global shuffle, Q=0: pure local shuffle
- In this paper, they use partial local shuffling (PLS), which means 0<Q<1
- PLS requires each worker stores up to $(1 + Q) N/M$ samples:
- $N/M$ (LS) < $(1 + Q) N/M$ (PLS) < $M/2$ (GS)
- B. Exchanging Samples Between Workers
- C. Implementation
- Two data primitives provided by PyTorch
- A
Datasetto store the samples and their corresponding labels - A
DataLoaderto iterate over the (batches of) samples
- A
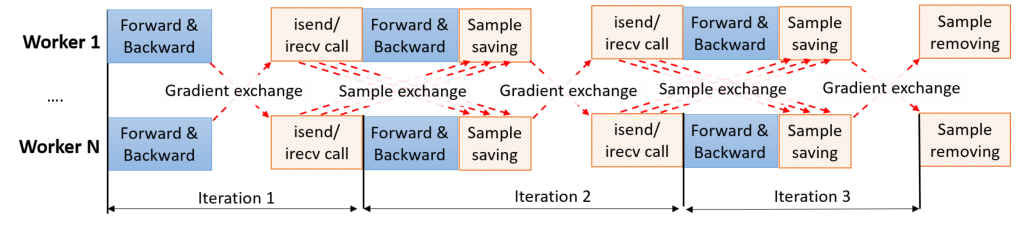
Schedulerfor managing the global exchange- Reduce the overhead: overlap communication with the forward and backward phases

- E.g. A epoch with $I=N/(bM)$ iterations, $b$ is a batch size. In each iteration, $(Q\times N/M)/I = Q\times b$ samples are sent/received from one worker
- Two data primitives provided by PyTorch
4 SHUFFLING IN DISTRIBUTED SGD
Understanding: partial local shuffling Accuracy $\approx$ global shuffling Accuracy
A. Partial Local vs. Global Shuffling: Gradients
- partial local shuffling produces the same gradients as global shuffling.
B. Convergence Rate and Shuffling Error
for insufficient global shuffling in the non-convex case, the convergence rate’s upper bound include three terms
- \[O\left(\sqrt{\frac{1}{S|N|}}+\frac{\log |N|}{|N|}+\frac{|N| \epsilon(A, N)^2}{b|M|}\right)\]
$S$ is the number of epochs, and $\epsilon(A, N)$ is the shuffling error of algorithm $A$ with the samples $N$
And shuffling error can be simplified: $\epsilon(A, h, N)=1-\frac{\sigma}{ N ! }$
- for practical dataset sizes and number of workers, the shuffling error $\epsilon(A, h, N)\rightarrow1$.
5 EVALUATION
- D. Equivalence of Local and Global Shuffling: When Local is Enough
- while local shuffling starts to converge slower than its global counterpart, local partial shuffling provides almost identical accuracy trajectory with global sampling, which in turn with a feasible learning rate schedule could lead to faster overall convergence and thus a reduction in runtime.
- On some larger datasets, local shuffling accuracy == global shuffling
- Indicates that workers do not actually need to process a large portion of the whole dataset, and exchanging the gradient weights is enough to ensure convergence.

- Since global shuffling reads from the PFS, the cost of I/O is much higher than those of local and partial shuffling.

6 RELATED WORK
7 CONCLUSION
- Eliminating unnecessary shuffling of data samples in distributed SGD can have profound implications on the I/O requirements of the overall training procedure.
- No need to replicate data everywhere, which reduces the cost of data staging in HPC environments.
- Smaller local data storage suffices that could enable training comparable neural network models in more modest storage environments, such as over local tmpfs, opening up the potential for less powerful HPC systems to be utilized for deep learning workloads.